Stellaris EVALBOT
User's Guide:
Data Sheet:
Notes d'applications :
ADC Oversampling Techniques for Stellaris®
Family Microcontrollers:
spma001a.pdf
Using the Stellaris® Microcontroller Analog-to-Digital Converter (ADC)
LM3S8962_ADC.pdf
Mise en oeuvre d'une communication ZigBee
sur EvalBot a l'aide de modules Xbee
1- en salle de preference 5201 (ou
5207).
- booter un PC de la salle sur windows 7 standard
- ouvrir une session sur son compte
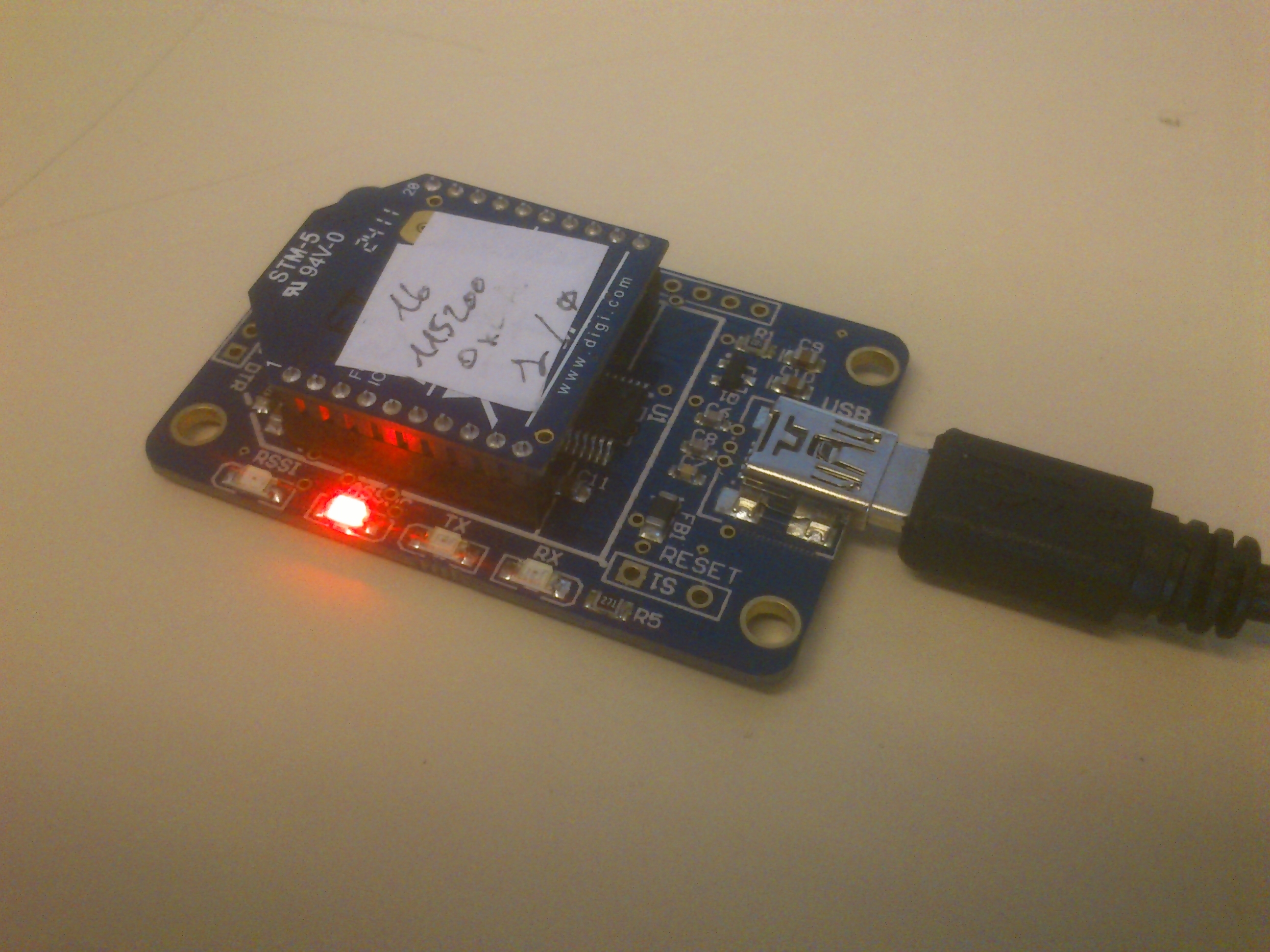
- Relier la socket usb/xbee muni de son module Xbee
au PC a l'aide d'un cable mini usb
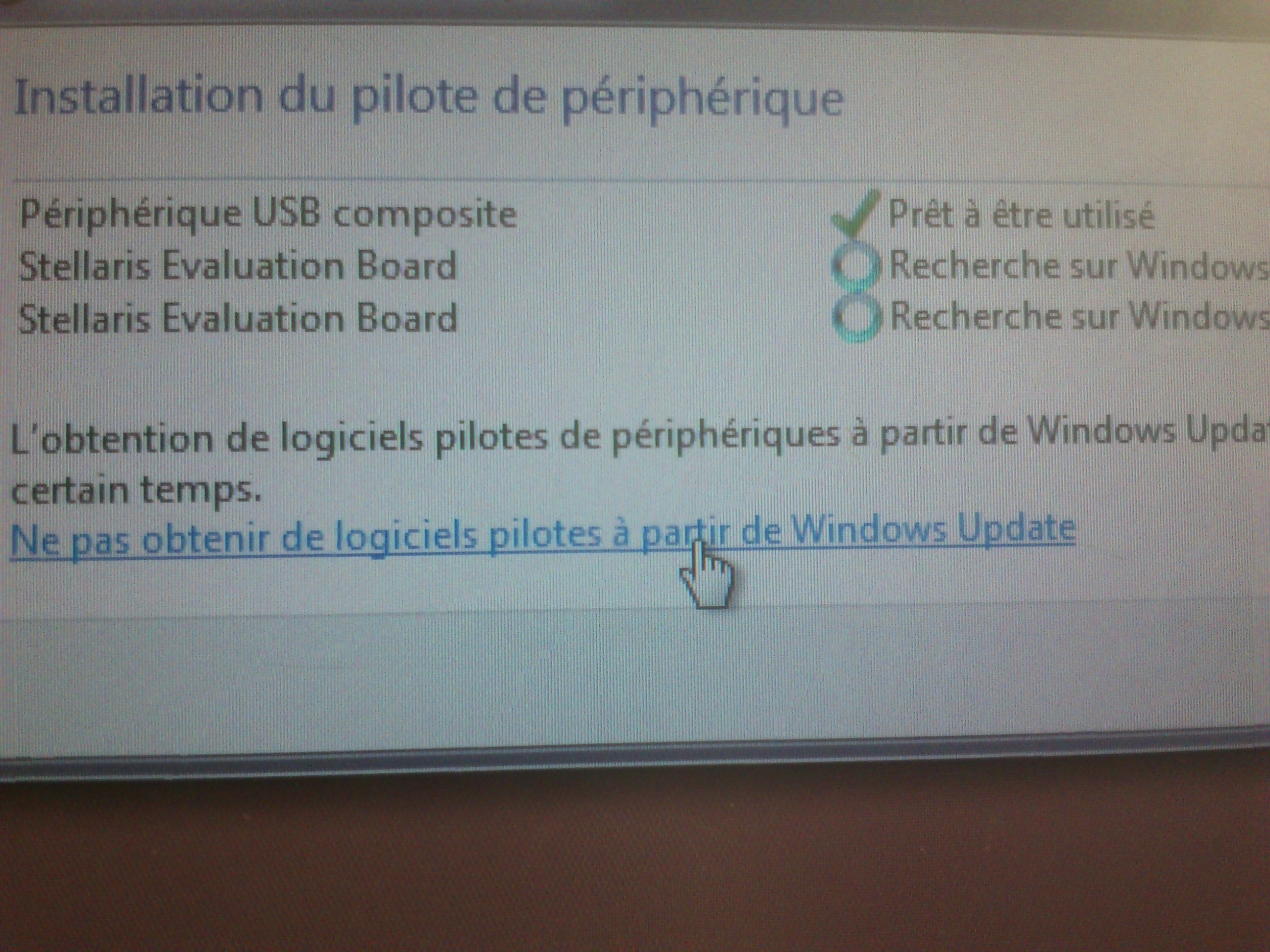
=> Pour gagner du temps
cliquez sur "ne pas installer de pilotes de logiciels depuis windows update"
-faire de meme avec L'EvalBot. Vous utiliserez le cable
mini usb en place sur le PC a brancher sur le port usb repéré en rouge:
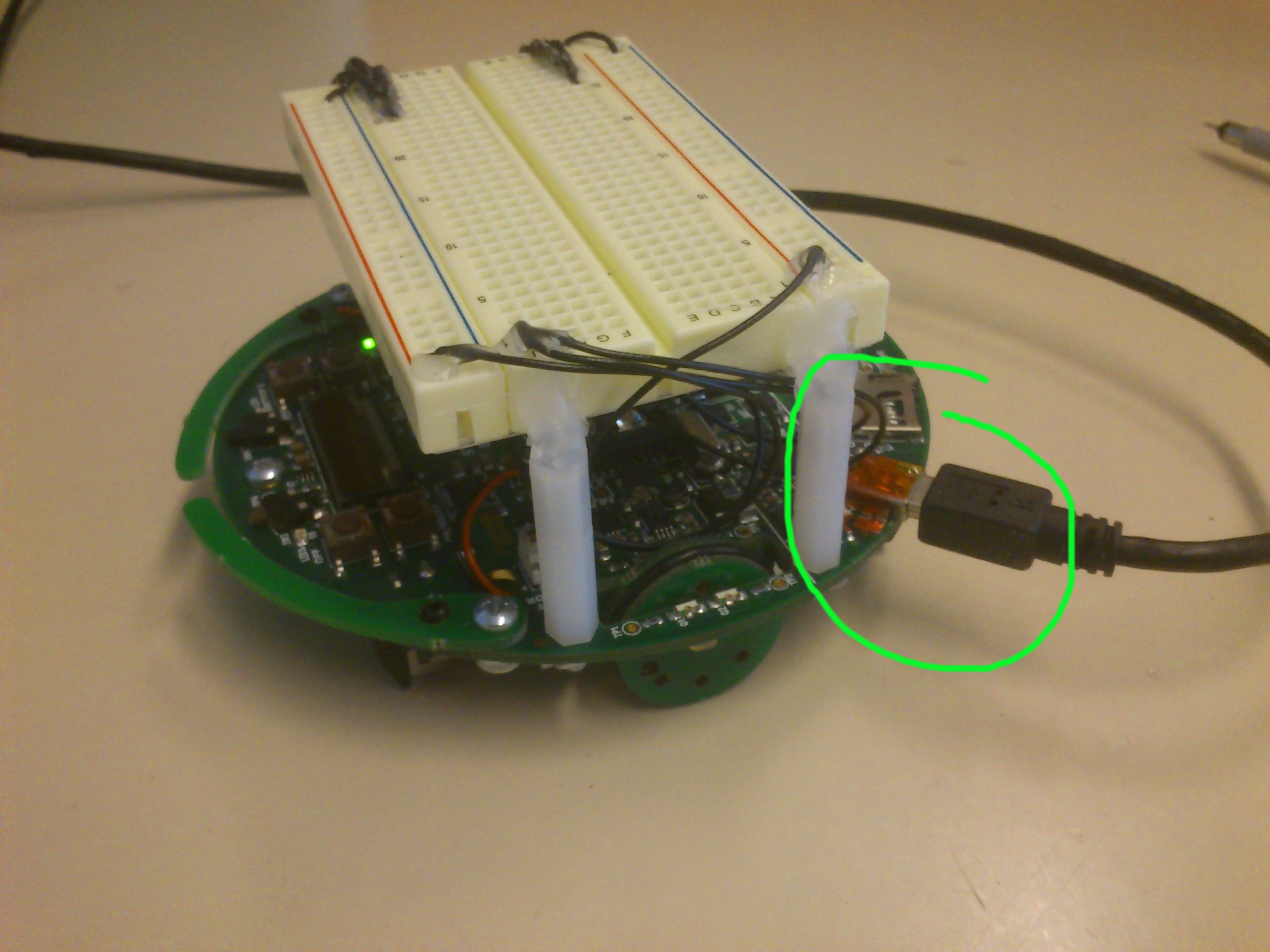
mettre sous tension L'EvalBot en appuyant sur 1 des 4 boutons celui répéré
en rouge.
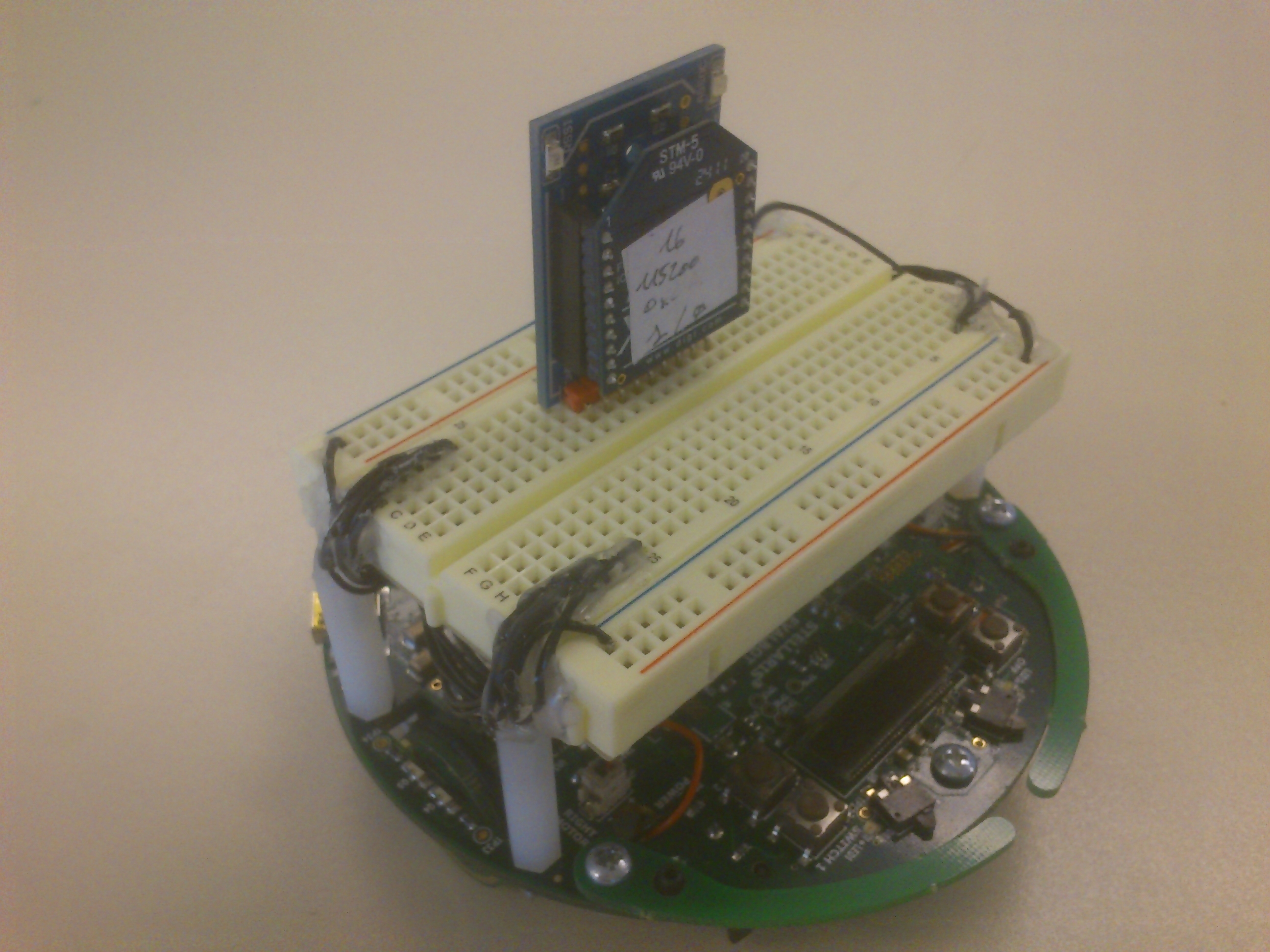
- mise en place du module Xbee :
Avec des fils rigides
(mono brin) isolés et dénudés, vous réaliserez les connexions
suivantes: GPIO
de L'EvalBot
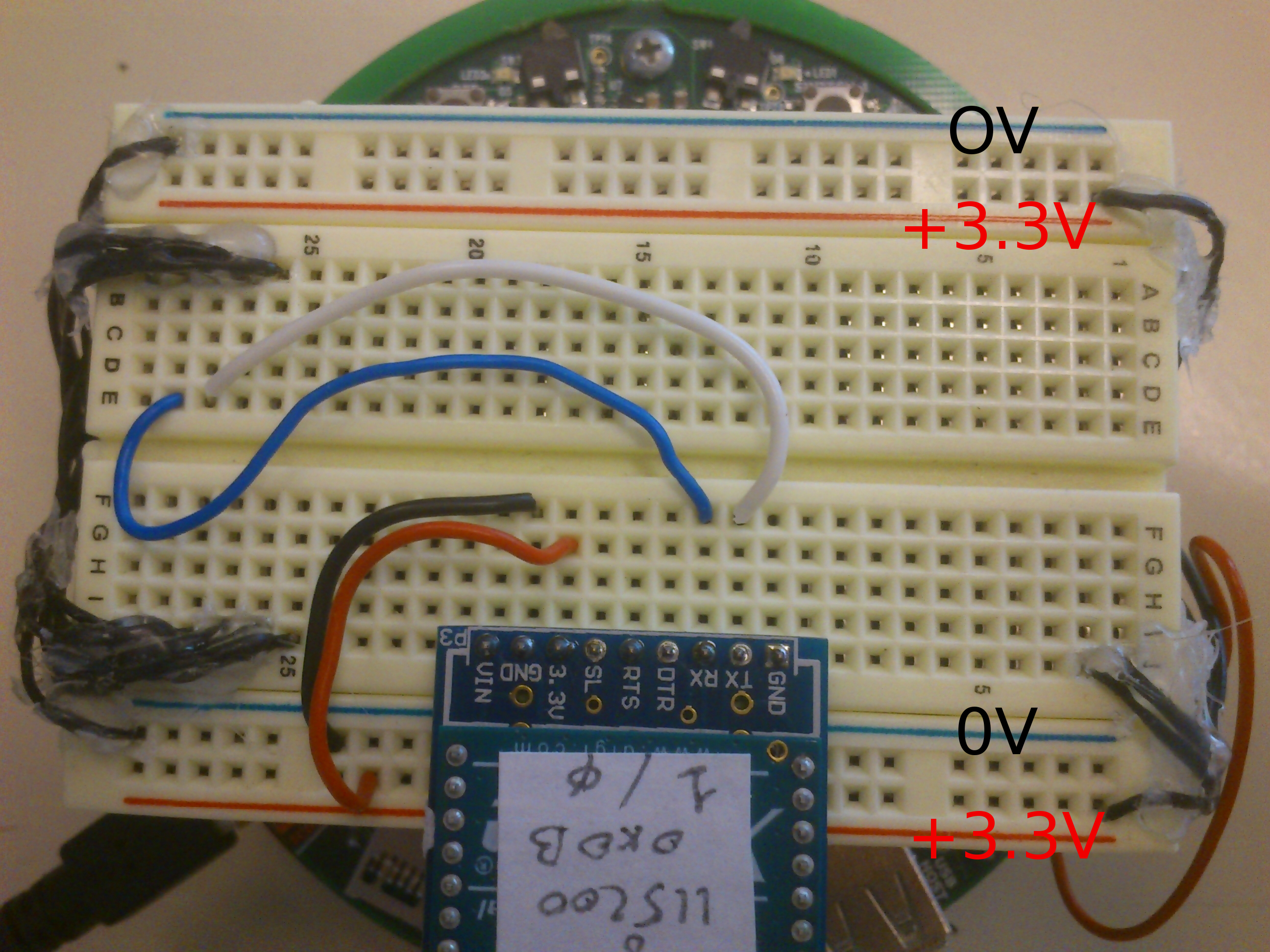
- depuis un des trous de masse OV (lignes bleues)
a connecter au GND du module
Xbee
- Depuis un des trous de +3.3V (lignes
rouges) a connecter au 3.3V du
module Xbee
- et connecter PB5 au Rx
(fil bleu) et PB4
au Tx (fis blanc) du
module Xbee respectivement les fils bleu et blanc sur la photo :
Sous window il faut utiliser l'application Tera
Term en mode Serial:
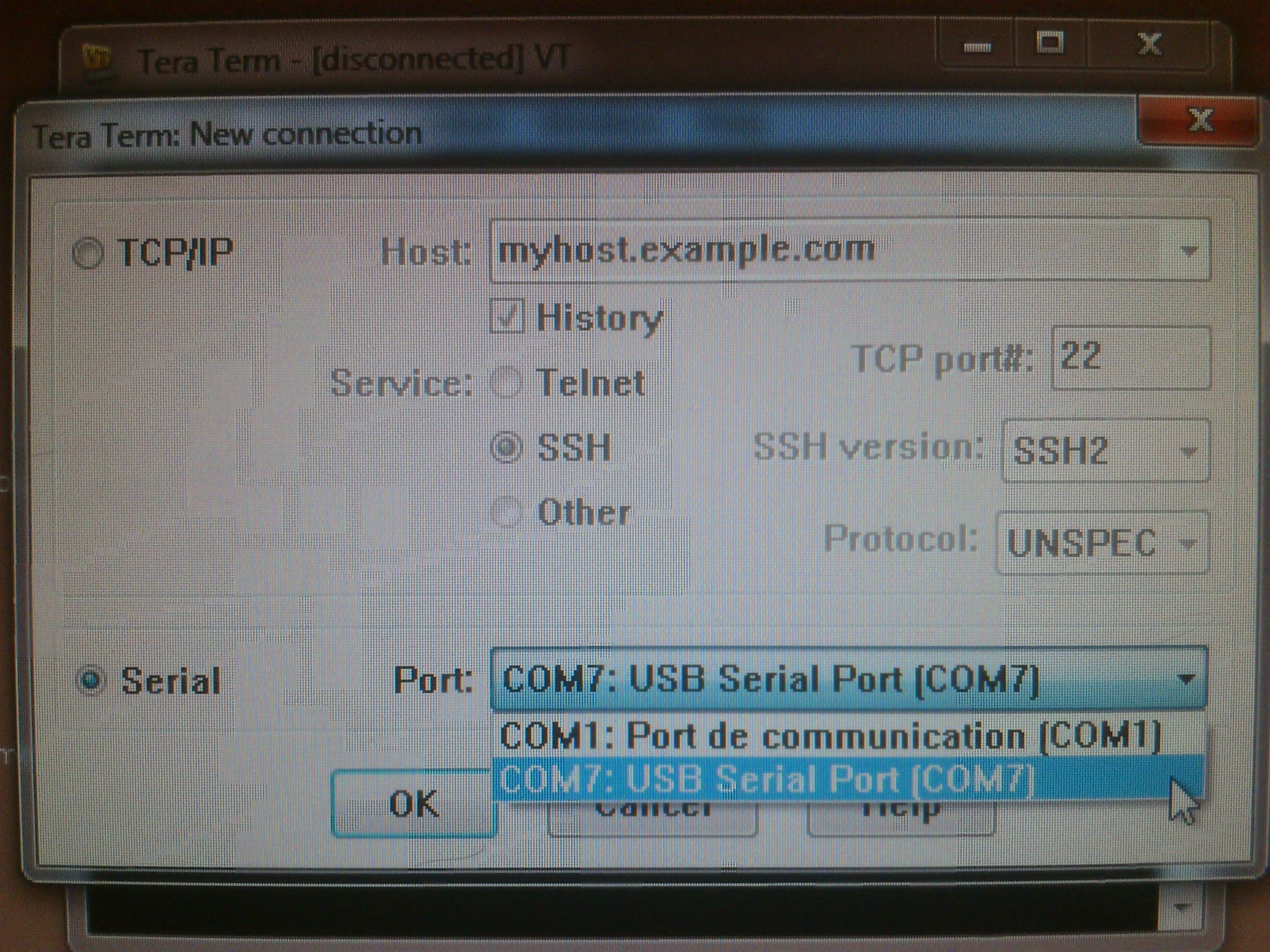
choisir le port com voulu a savoir que :
COM1 est le port serie physique
du
PC
les autres n° de
COM sont généré
dynammiquement par le systeme.
Il peut y en avoir 2 autres un pour le module
Xbee
(c'est le cas sur la photo) et un autre pour le port serie de
EvalBot par USB
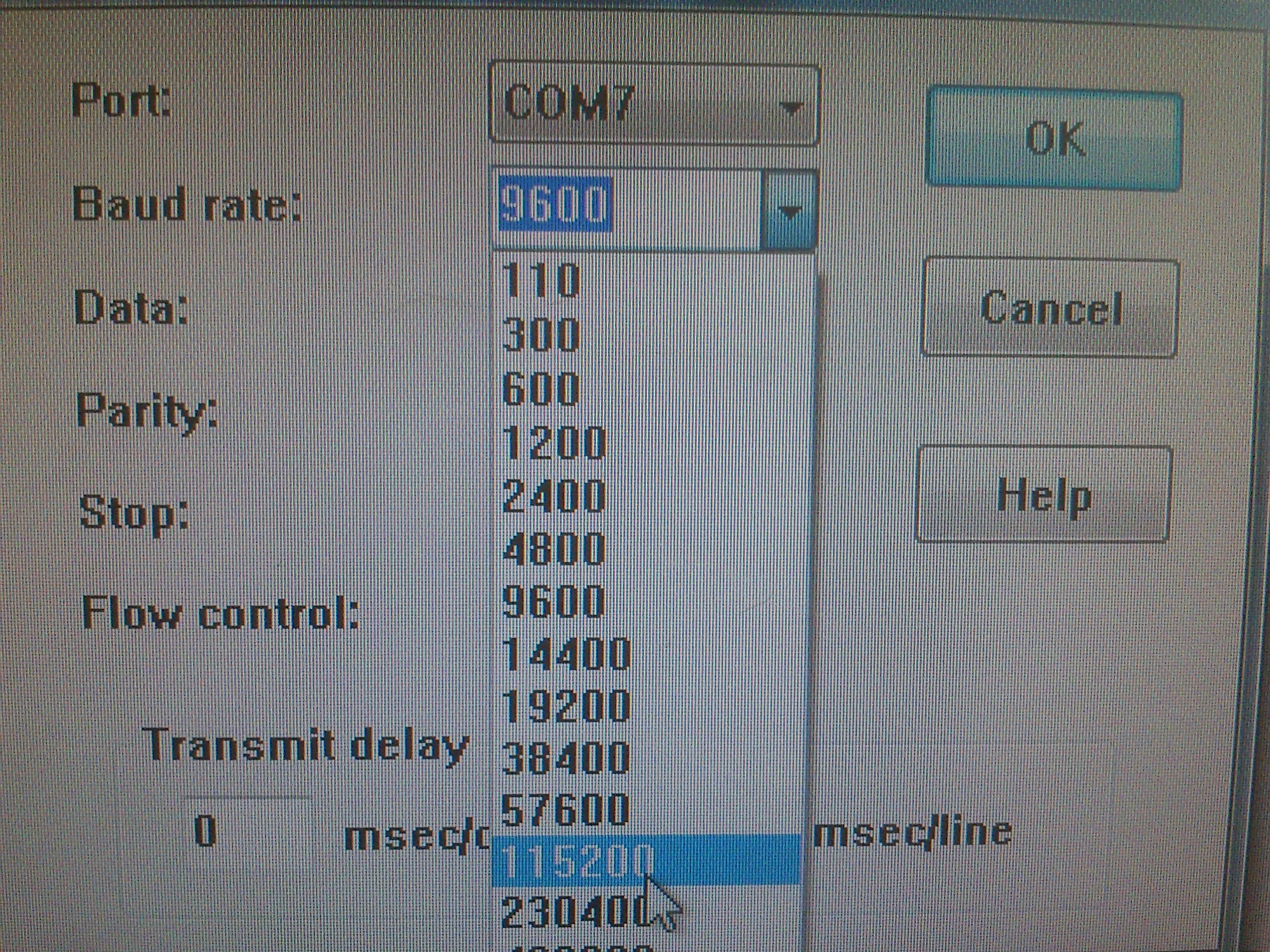
Il faudra choisir la vitesse du port serie soit 115200
bauds:
Le code source keil a télécharger et decompresser sur votre compte: EvalBot_demo_esiee.zip
produire la solution la télécharger dans l'EvalBot
a suivre des exemples de code pour programmer les ports serie d'un PC
sous linux et window (en C, Python, java,....) :
- un exemple de communication serie entre un PC et un module Xbee
en VisualStudio
C++